Gantt Diagram
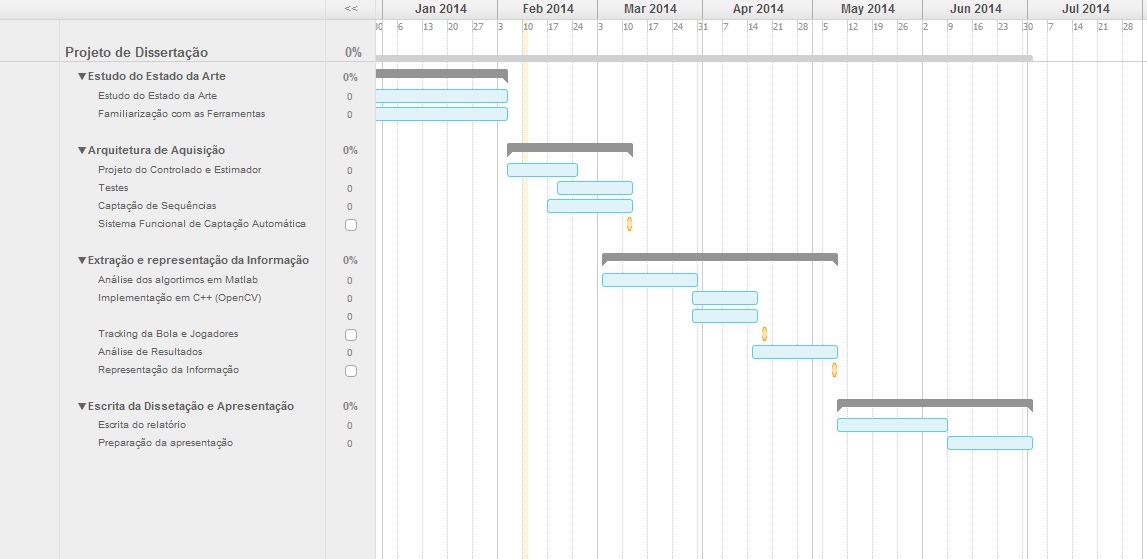
4-30th June
The last month of work was dedicated to write the thesis report showing the final results and main conclusions of the methods developed during the last semester.
Main conclusions, results and documents can be found Here
28-3rd June
Short term prediction presented last week was developed using Mean Shift algorithm. It was possible to detect players while HOG detections were not available using information about color appearance.
This week there was also developments on camera calibration stage. The use of lines detection using Hough transform and the matching between a virtual model performed great results on the test sequences.
21-27th May
As seen on the last week report, it was needed to develop a short-term prediction of players position. Usually, linear dynamic models of movement of players are used. But in the case of tracking on image coordinates, this model is not so accurate.
However, other type of information can be used, namely the color. A Histogram based tracking is used to predict player position and HOG detector used to correct it.
14-20th May
During this week several methods for players detections were tested and compared based on ground truth annotation.
HOG people detector besides a good recall (detections/(detections+missed)) has low precision (detections/(detections+false positives)).
Constraints about color, size and position were applied and precision of the method increased but in otherwise recall decreased significantly.
For an efficient tracking and detection, a short-term detection/prediction is required and use the detections only to long term corrections
7-13th May
Development of a second version of the annotation program in Matlab. With this program is possible:
-Annotate players bounding box and centroid, camera calibration, the team
-Choose the Annotation framerate (on first tries, were used a framerate of 1/10 frames)
30-6th May
To compare the results of the methods used in detection, calibration and other stages of the system framework is needed a ground-truth annotation.
During this week it was created a first version of the annotation program in Matlab
Because of the the academic celebration "Queima das Fitas" there was not a big development on this topic
22-29th April
This week my efforts returned to the player detection problem
By adjusting some detector parameters and adding some spatial information to filter the results it was possible to detect most of the player even in bad conditions:
Previous Results: 
Improved Results: 
In long term, some tracks are lost due to an excessive number of False Positives from the Detector
15-21st April
After applying the static calibration to long video sequences, it was observed that it drifts during time. So it's need some dynamic and automatic recalibration.
During this week was study method using information of the lines of the field using Hough transformation. Rotation and Translation transformation are used to estimate camera calibration automatically.
The results were good but enough for an initial framework of the system, but for sure it will be on the topics to improve.
8-14th April
This week was dedicated to the preparation of the presentation of the work done so far in this master thesis to the UTM group meeting. The slideshow can be found in "Results" section
1-7th April
The beggining of the week was dedicated to solve the calibration issue. It was found that lens distortion usually known by "barrel effect" was the cause of the bad calibration result. After correct it, the results were improved:
Image after lens distortion correction: 
Result of calibration using corrected image: 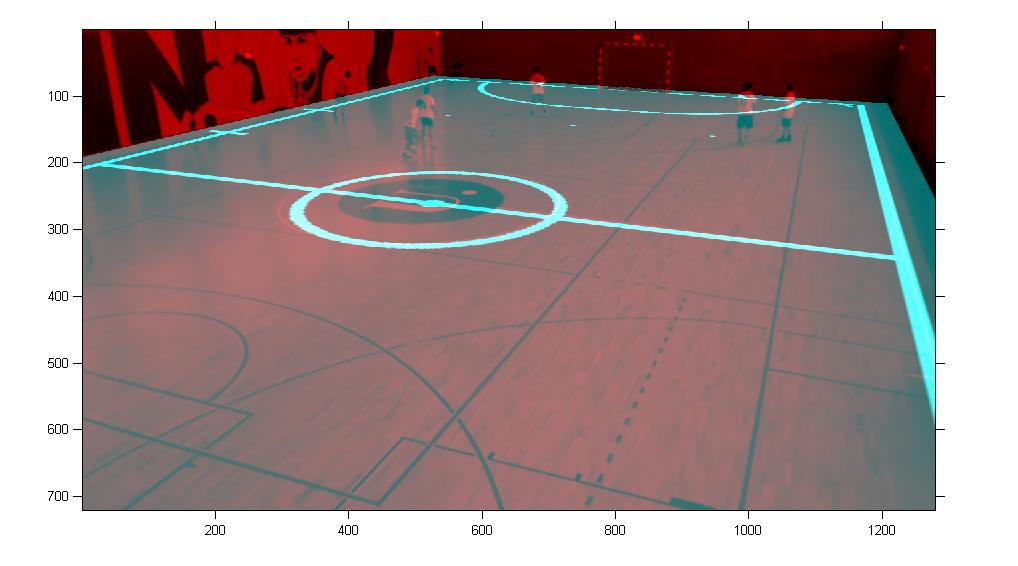
24-31st March
The relation between image coordinate system and world coordinate system can be expressed by the camera calibration parameters. These paremeters can be estimted by correponsing pair point between the two coordinate systems. This points can be chosen manually or automatically.
Camera Calibration is commonly expressed in a 3x3 Matrix. In this case, the best transformation to relate both C.S. is a projective one. It is expressed by 8 parameters, this means it needs 4 pair points.
The representation of the world coordinate system is made by using a Futsal Pitch model frame: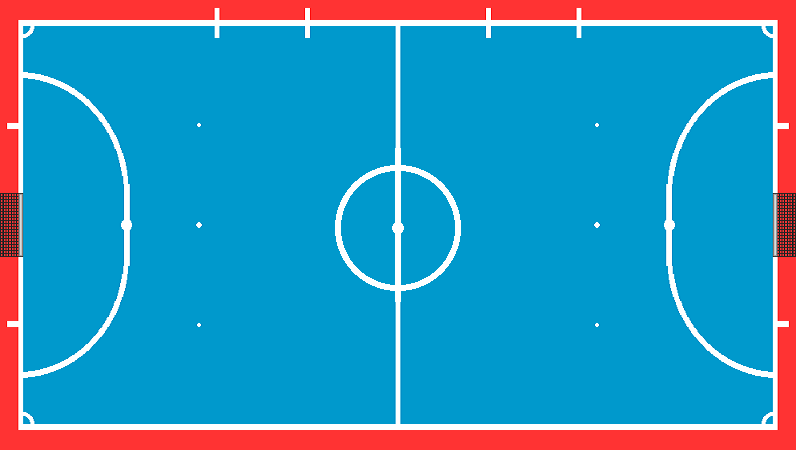
The result after estimating camera parameters using the 4 pair points corresponding to the 4 corners of half of the field. 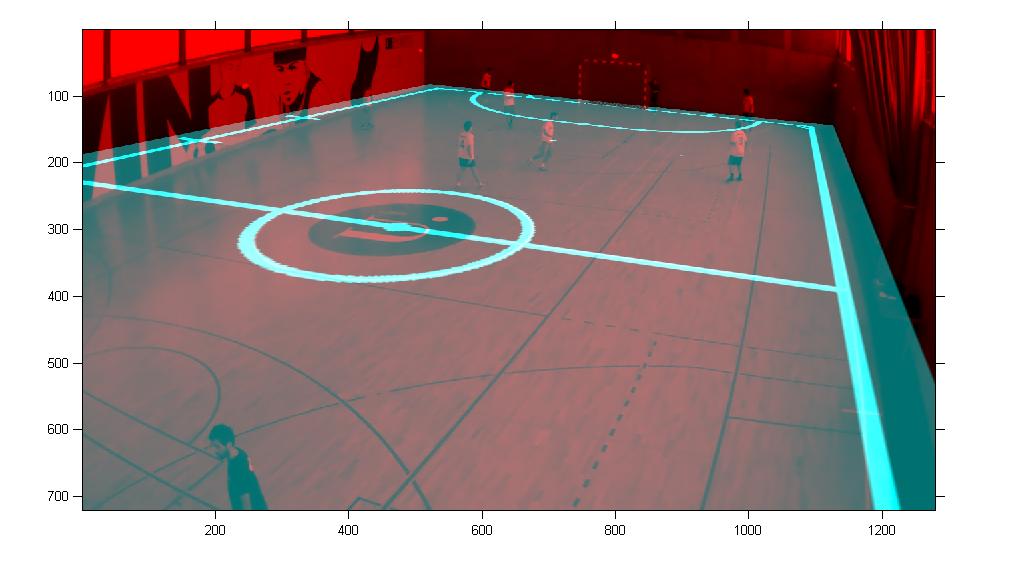
This first result is not so good as expected to be. During the week was not possible to improve it.
11-23rd March
First tries on players segmentation/detection: Because of hte non statical background is not possible to use a foreground segmentations widely used in this kind of applications. Another method found commonly in literature is based on color segmentation, but in order to lines of different colors and ilumination, this is also not possible.
Histogram Oriented Gradient features are used to detect objects in different color,light or environment conditions. Using a boost algorithm or Support Vector Machine is possiblie to train a classifier to detect a certain object with a huge samples of positive and negative appearances of the object.
An example of HOG people detection with a standard classifier for people in upright position:
Main Issues: Low False Positive Rate, but a lot of missed Positives; It fails when players are running, tackling or in the case of occlusions.
10-16th March
At the first view, it was obvious that image sequences recorded by Ar.Drone 2.0 would need some stabilization and motion compensation.
To achieve this, it was used frame-to-frame affine transformation estimation and re-projection. This estimation is based on Point Features Matching.
3-9th March
-Tunning of the PID control parameters to autonomous flight. A bug found in altitude control was only solved in the end of the week. Because of that there was not further results.
-First images recordings on Faculty's indoor soccer tournment. It was used the drone controlled manually using Parrot's Android App.
First Impressions:Image Quality was impressive. The camara's modification made previously seems enough to achieve the desired results. Beside that, there was some negative aspects: There is the need of a posterior video stabilization. Players running below the drone causes unstability because of the ultra-sounds interference. Auto-Hover mode of the vehicle is not enough to fix on an exact location.
24-2nd March
-Design and developing of a control system for an autonomous flight to record image sequences from indoor soccer games
-In order to stabilize the Drone on a fix location there is the need to estimate the global position of the Air Vehicle. To achieve that is used a Kalman Filter to correct the position prediction based on the inertial sensors with the the detection of a 2D tag on the floor.
-First experimental tries allowed to enable the system concepts even raw results were not acceptable for a real application.
17-23rd February
-Familiarization with workplace (INESC-Porto)
-Discussion about an early image acquisition system architecture: The Ar.Drone will hover over a fixed point on the top of the pavilion. Need of a visual marker for absolute location and feedback control to stabilize on the fixed localization
-Ar.Drone 2.0 front camera modification: As frontal camera's direction is fixed and frontal there was the need to change it. Preliminar Results:
