Tendo em conta a dificuldade que houve na utilização dos botões (pois apresentam um funcionamento assíncrono) bem como da “variável” tempo, foi criado um módulo Python (gpio_utils.py) com classes que facilitam o uso destes elementos assim como dos LEDs:
import pigpio
class timer:
def __init__(self, pi):
self._pi = pi
self.reset()
def reset(self):
self._t = self._pi.get_current_tick()
def time(self):
return self._pi.get_current_tick() - self._t
class button:
def __init__(self, pi, pin):
self._pi = pi
self._pin = pin
self._pi.set_mode(self._pin, pigpio.INPUT)
self._pi.callback(self._pin, pigpio.FALLING_EDGE, self._cb)
self._h = False
def _cb(self, gpio, level, tick):
self._h = True
def hitted(self):
tmp = self._h
self._h = False
return tmp
def state(self):
return not self._pi.read(self._pin)
class led:
def __init__(self, pi, pin):
self._pi = pi
self._pin = pin
self._pi.set_mode(self._pin, pigpio.OUTPUT)
self.off()
def off(self):
self._pi.write(self._pin, 0)
def on(self):
self._pi.write(self._pin, 1)
Desde logo é possível dar o primeiro passo no projeto semaforo:
import platform
import pigpio
import time
from gpio_utils import timer, button, led
if platform.uname()[4][0:3] == "arm":
pi = pigpio.pi()
else:
pi = pigpio.pi("10.0.0.1xx")
t = timer(pi)
Bp = button(pi, 23)
Bi = button(pi, 24)
Lg = led(pi, 21)
Ly = led(pi, 20)
Lr = led(pi, 16)
leave = False
while not leave:
if Bp.hitted():
Lg.on()
t.reset()
if Bi.hitted() or t.time() > 3000000:
Lg.off()
time.sleep(.05)
leave = Bi.state() and Bp.state()
Lg.off()
Ly.off()
Lr.off()
pi.stop()
Para implementar o normal funcionamento pretendido para o semáforo, vamos usar uma abordagem já nossa conhecida de “Eletrónica Digital” que são as “máquinas de estados finitos” (FSM – Finite State Machines). Na sua versão mais simples teríamos o seguinte diagrama de transições de estados:
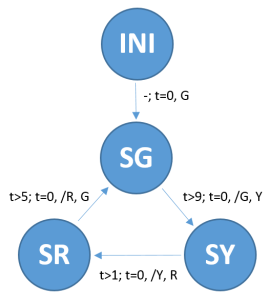
Optou-se por uma máquina de “Mealy” para minimizar as chamadas às funções da biblioteca pigpio que assim se fazem apenas quando das transições entre estados.
import platform
import pigpio
import time
from gpio_utils import timer, button, led
if platform.uname()[4][0:3] == "arm":
pi = pigpio.pi()
else:
pi = pigpio.pi("10.0.0.1xx")
t = timer(pi)
Bp = button(pi, 23)
Bi = button(pi, 24)
Lg = led(pi, 21)
Ly = led(pi, 20)
Lr = led(pi, 16)
# States
INI = 0
SG = 1
SY = 2
SR = 3
s = INI
leave = False
while not leave:
if s == INI:
ns = SG
Lg.on()
t.reset()
elif s == SG:
if t.time() > 9000000:
ns = SY
Lg.off()
Ly.on()
t.reset()
else:
ns = SG
elif s == SY:
if t.time() > 1000000:
ns = SR
Ly.off()
Lr.on()
t.reset()
else:
ns = SY
elif s == SR:
if t.time() > 5000000:
ns = SG
Lr.off()
Lg.on()
t.reset()
else:
ns = SR
s = ns
time.sleep(.05)
leave = Bi.state() and Bp.state()
Lg.off()
Ly.off()
Lr.off()
pi.stop()
Vamos agora adicionar a funcionalidade para antecipar o amarelo:
import platform
import pigpio
import time
from gpio_utils import timer, button, led
if platform.uname()[4][0:3] == "arm":
pi = pigpio.pi()
else:
pi = pigpio.pi("10.0.0.1xx")
t = timer(pi)
Bp = button(pi, 23)
Bi = button(pi, 24)
Lg = led(pi, 21)
Ly = led(pi, 20)
Lr = led(pi, 16)
# States
INI = 0
SG = 1
SY = 2
SR = 3
s = INI
leave = False
while not leave:
if s == INI:
ns = SG
Lg.on()
flag = False
t.reset()
elif s == SG:
if Bp.hitted():
flag = True
if t.time() > 9000000 or flag and t.time() > 4000000:
ns = SY
Lg.off()
Ly.on()
t.reset()
else:
ns = SG
elif s == SY:
if t.time() > 1000000:
ns = SR
Ly.off()
Lr.on()
t.reset()
else:
ns = SY
elif s == SR:
if t.time() > 5000000:
ns = SG
Lr.off()
Lg.on()
flag = False
t.reset()
else:
ns = SR
s = ns
time.sleep(.05)
leave = Bi.state() and Bp.state()
Lg.off()
Ly.off()
Lr.off()
pi.stop()
Finalmente é adicionado o modo intermitente:
import platform
import pigpio
import time
from gpio_utils import timer, button, led
if platform.uname()[4][0:3] == "arm":
pi = pigpio.pi()
else:
pi = pigpio.pi("10.0.0.1xx")
t = timer(pi)
Bp = button(pi, 23)
Bi = button(pi, 24)
Lg = led(pi, 21)
Ly = led(pi, 20)
Lr = led(pi, 16)
# States
INI = 0
SG = 1
SY = 2
SR = 3
INT = 4
SY1 = 5
SY0 = 6
s = INI
leave = False
while not leave:
if s == INI:
ns = SG
Lg.on()
flag = False
t.reset()
elif s == SG:
if Bp.hitted():
flag = True
if t.time() > 9000000 or flag and t.time() > 4000000:
ns = SY
Lg.off()
Ly.on()
t.reset()
else:
ns = SG
elif s == SY:
if t.time() > 1000000:
ns = SR
Ly.off()
Lr.on()
t.reset()
else:
ns = SY
elif s == SR:
if t.time() > 5000000:
ns = SG
Lr.off()
Lg.on()
flag = False
t.reset()
else:
ns = SR
if s == INT:
ns = SY1
Ly.on()
t.reset()
elif s == SY1:
if t.time() > 1000000:
ns = SY0
Ly.off()
t.reset()
else:
ns = SY1
elif s == SY0:
if t.time() > 1000000:
ns = SY1
Ly.on()
t.reset()
else:
ns = SY0
if Bi.hitted():
Lg.off()
Ly.off()
Lr.off()
if s == SG or s == SY or s == SR:
ns = INT
if s == SY1 or s == SY0:
ns = INI
s = ns
time.sleep(.05)
leave = Bi.state() and Bp.state()
Lg.off()
Ly.off()
Lr.off()
pi.stop()