
Project Description
Cooperative navigation between long-range underwater and surface vehicles for enhanced sub-surface ocean observation
Contact: José Carlos Alves ([email protected])
This PhD project will be developed in the group Robotics – Autonomous Systems of INESC TEC
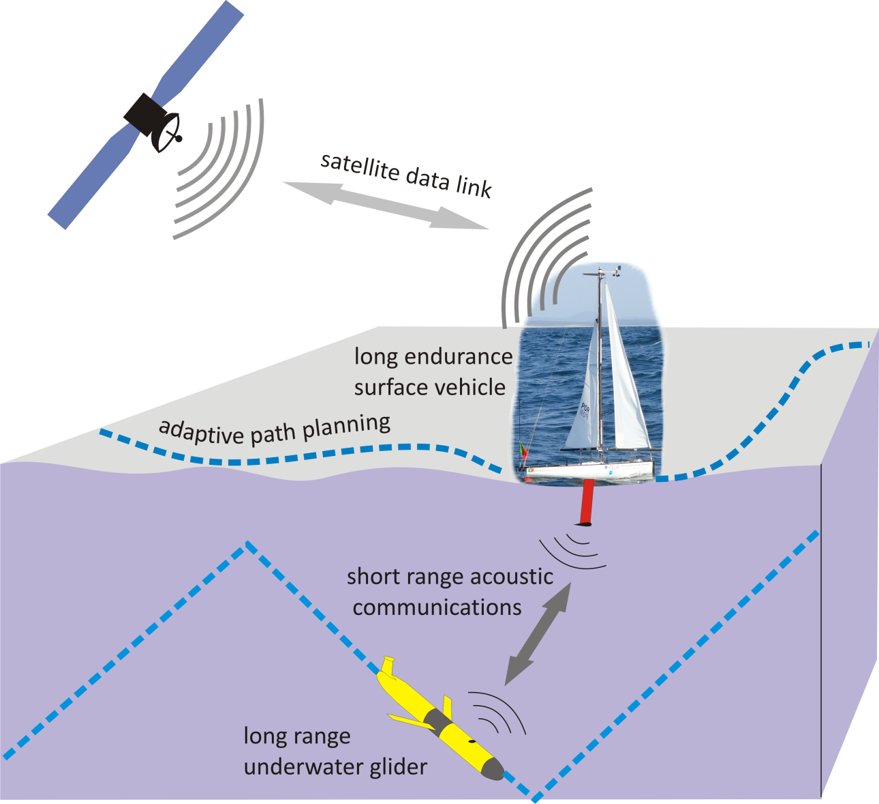
Long range autonomous underwater vehicles suffer from the absence of real-time communications with the above-surface world due to the lack of radio frequency signals underwater. This impacts negatively in the positioning ability of underwater crafts and in the real-time observability of ocean data below the surface. The project aims to provide mechanisms for cooperative navigation between long range autonomous underwater vehicles (e.g. gliders) and long range autonomous surface vehicles, as wind or wave propelled boats, to create a localization and communication platform for maintaining a continuous data link to a submerged autonomous vehicle. Challenges to address are the adaptive navigation strategies for optimizing the localization and communication processes, constrained by the energy storage and harvesting, the environmental conditions and the global mission planning.